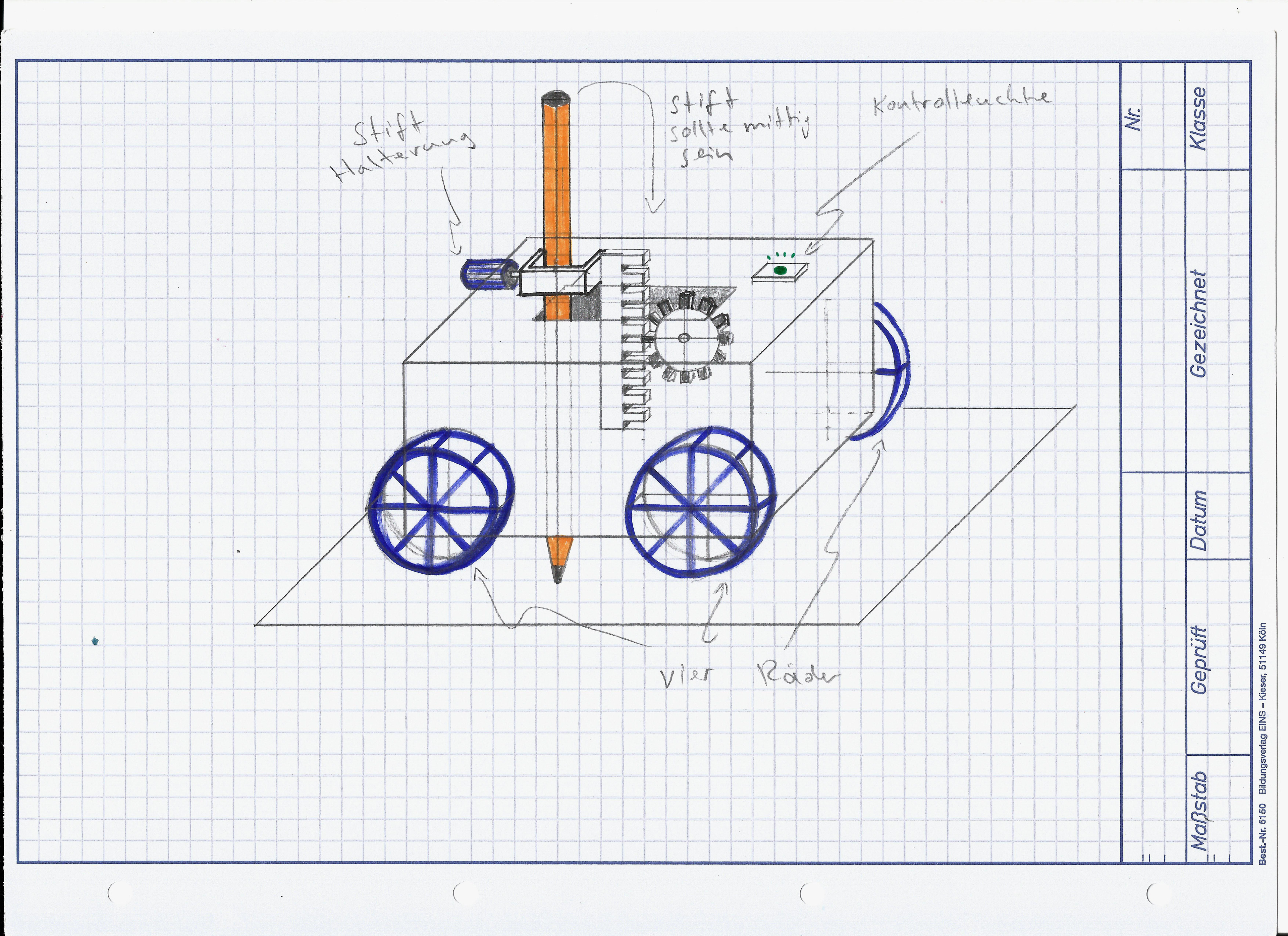
In this project, I participated in a class called "Interfaces IV - Capacitive Sensors" taught by Alexander Rechberg. This was my second experience delving into the world of micro controllers and sensors. My goal was to design and build a self-driving, wireless robot that could hold a pen and draw shapes on a flat surface of any size. I learned that in coding, something that may seem simple, can be quite challenging to execute, especially for a beginner. The process involved a lot of trial and error, success and setbacks. However, I managed to achieve my goal despite the challenges.
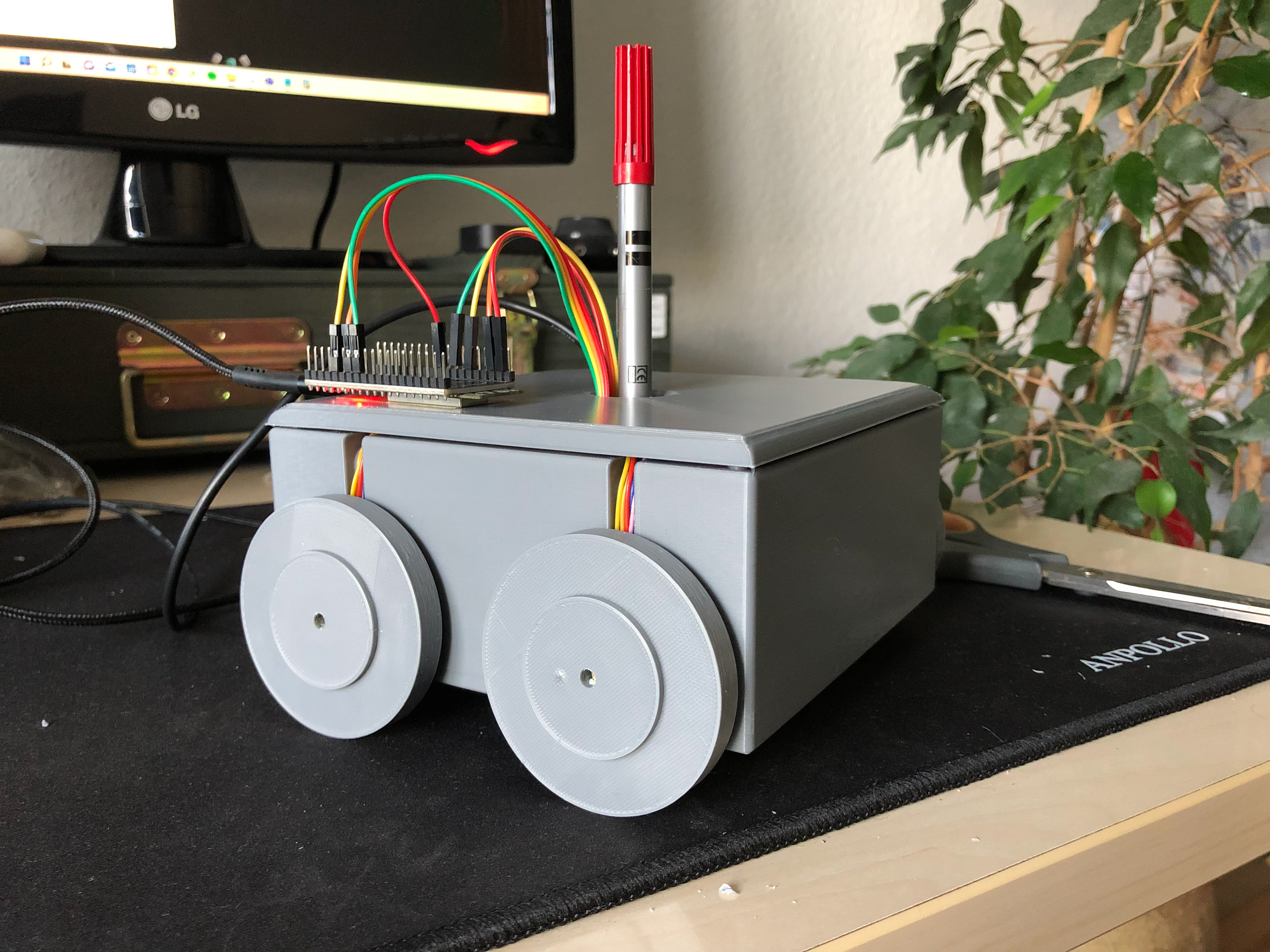
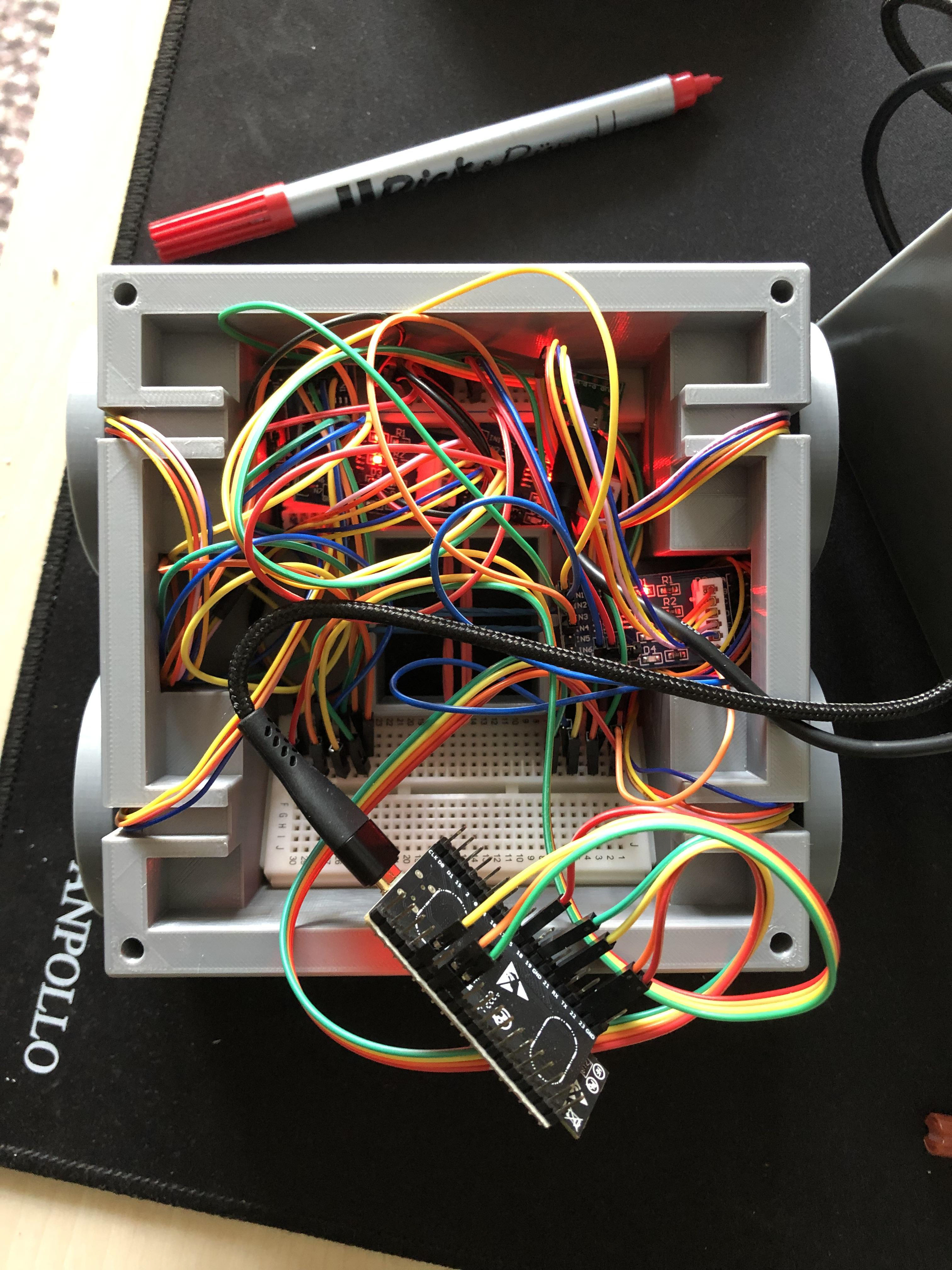
I chose the ESP-32 Arduino as my micro controller for this project. It is pretty small and has many Output/Input pins which I need to communicate with my stepper motors. I used stepper motors, because they are very precise and easier to control then servo motors. My power source is a power bank with two USB-Ports, one for the ESP-32 and the other one for the four stepper motors.
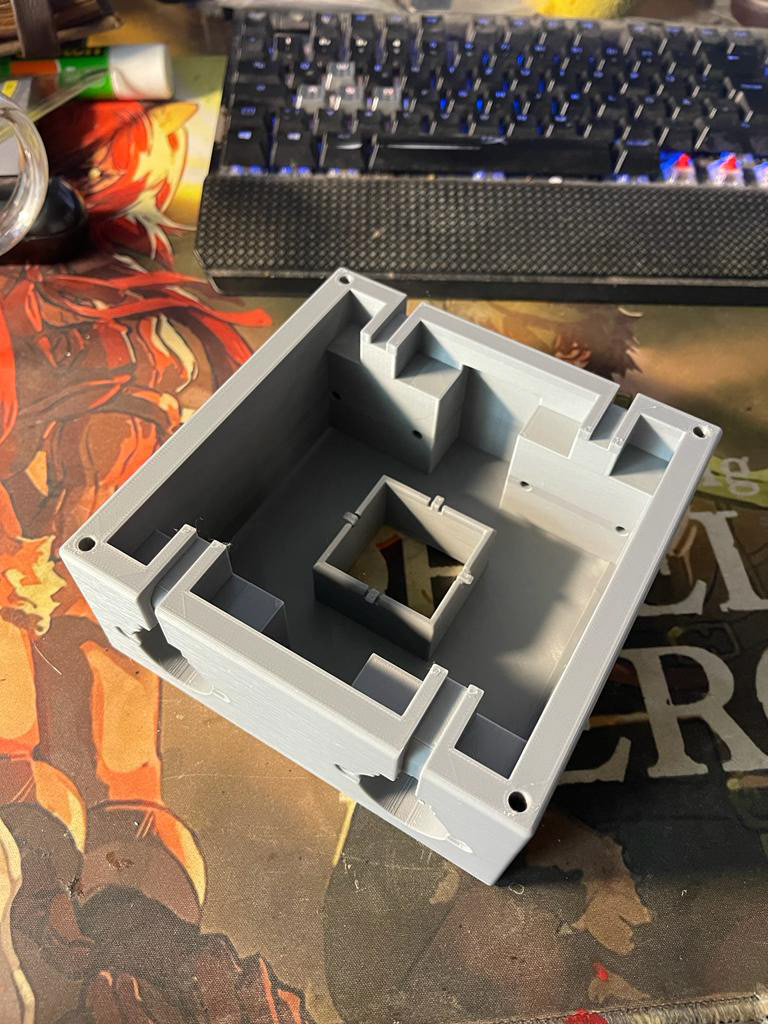
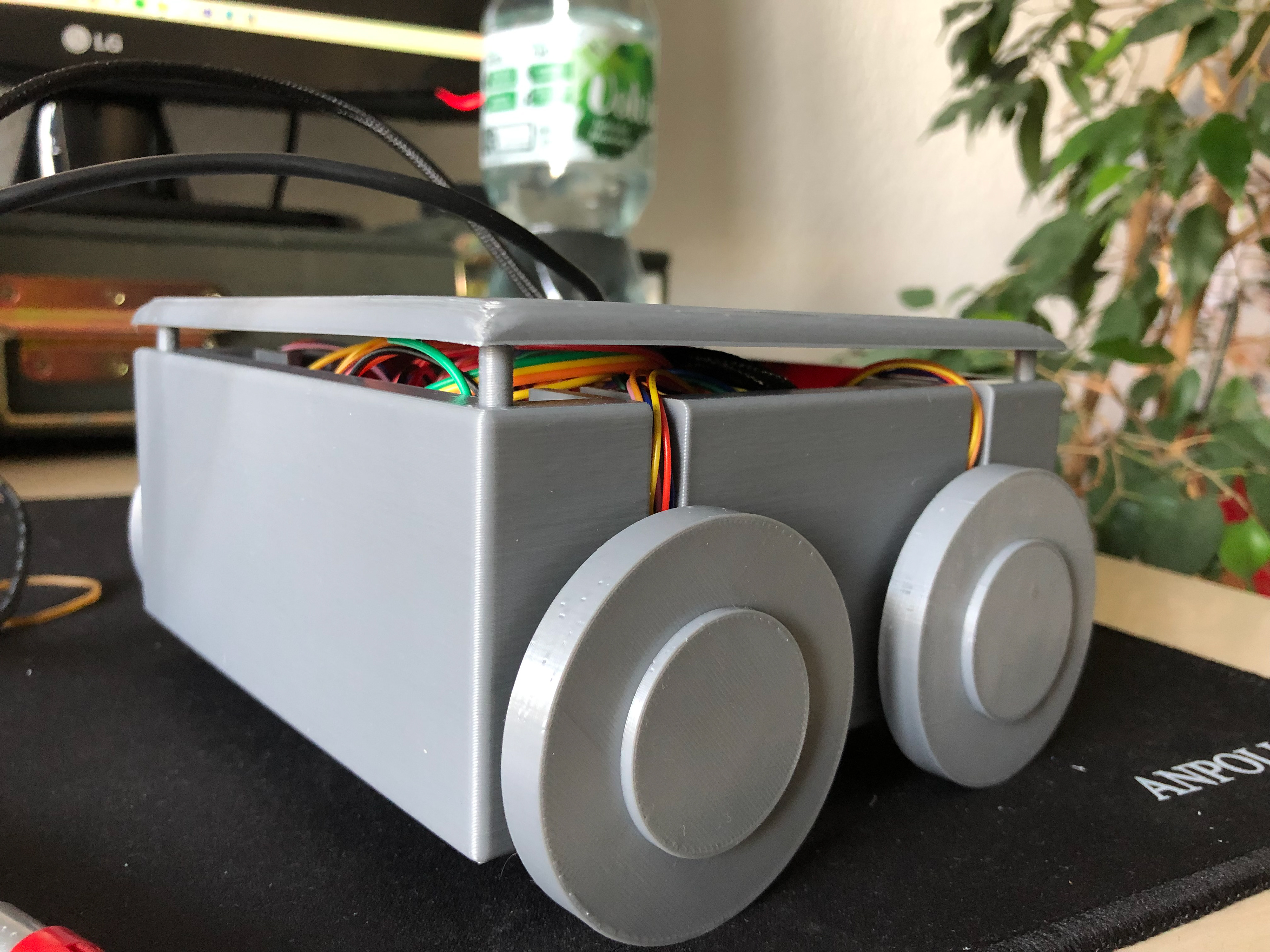
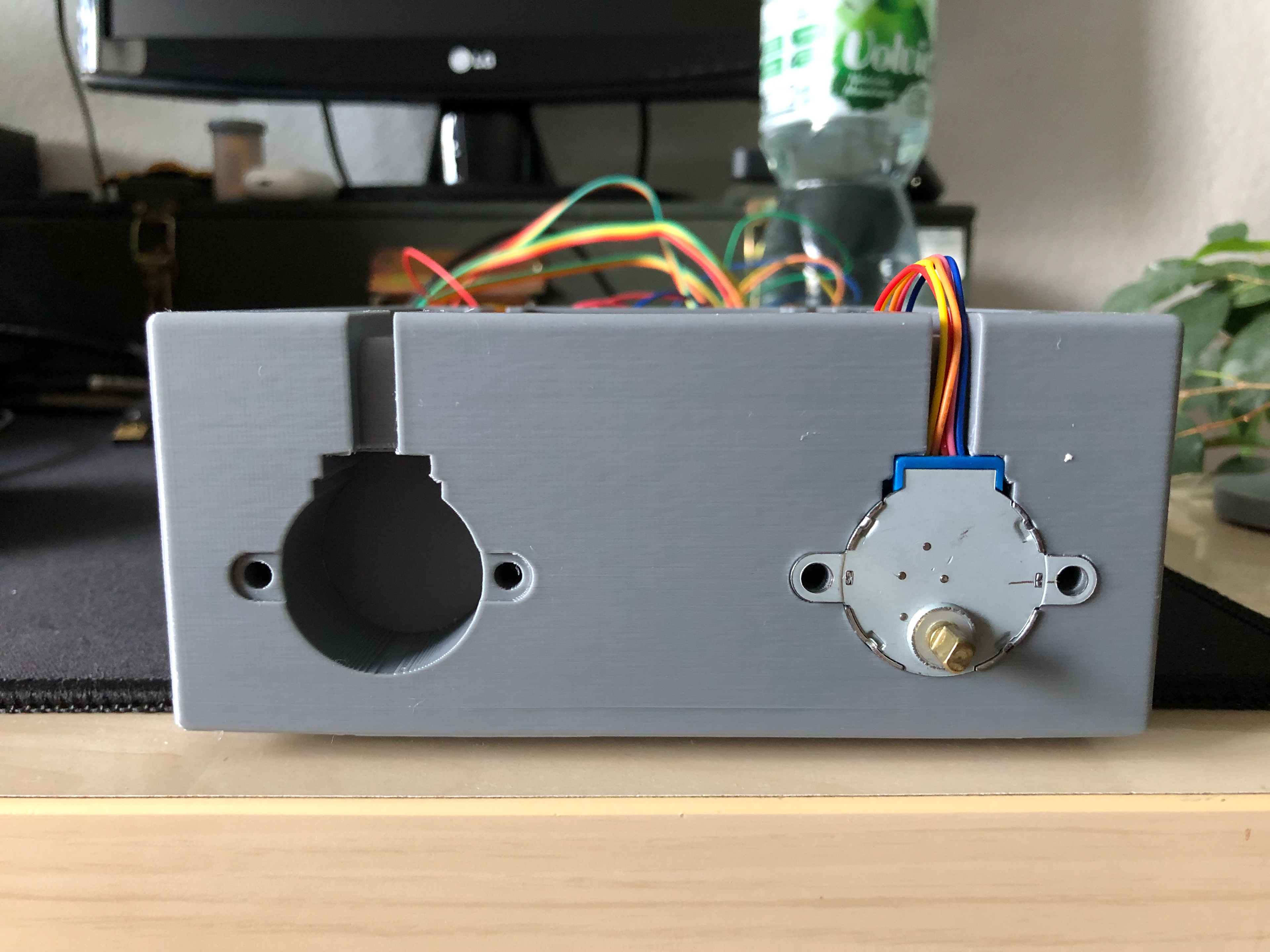
I 3D modeled the case in the software Blender, using the 3D-Print plugin from Campbell Barton to make it ready to be 3D printed. As the 3D-printing method I chose FFM (Fused Filament Modeling).